W niniejszej pracy poruszone zostały dwa zagadnienia. Pierwszym z nich jest opis oraz analiza działania ADS-B (ang. Automatic Dependent Surveillance – Broadcast) – systemu, dzięki któremu samolot cyklicznie rozgłasza, między innymi, swoją pozycję geograficzną uzyskaną z satelit GPS, kurs, prędkość, wysokość, znak wywoławczy, kod transpondera. Wśród korzyści, wynikających z zastosowania tego systemu, należy wymienić wzajemne informacje o ruchu wymieniane między samolotami, możliwość odbierania informacji pogodowych, wymiana informacji o locie (między samolotem, a Kontrolą Ruchu Lotniczego). Ponadto odbiorniki naziemne ADS-B używane przez Centra Zarządzania Ruchem Lotniczym są zdecydowanie tańsze w zakupie oraz eksploatacji niż tradycyjne radary wtórne.
Kolejnym poruszonym zagadnieniem jest budowa amatorskiego odbiornika ADS-B pracującego na częstotliwości standardowej dla tego systemu – 1090 MHz, odbiór i odczyt informacji przekazywanych z samolotów oraz wyświetlenie tych danych na mapie w przeglądarce internetowej. Realizacja sprzętowa tego przedsięwzięcia została zrealizowana przy użyciu mikrokomputera Raspberry Pi 2 B V1.1, anteny półfalowej pracującej na częstotliwości 1090 MHz i osiągającej zysk na poziomie 9 dBi, dekodera DVB-T USB wyposażonego w chipset RTL2832U oraz R820T2 (dzięki tym modułom możliwy jest również odbiór informacji z satelitów pogodowych oraz nasłuch dowolnej analogowej lub cyfrowej transmisji radiowej w zakresie 24 MHz ÷1766 MHz, wykorzystując oprogramowanie RTL – SDR) [9, 3, 6, 11, 21].
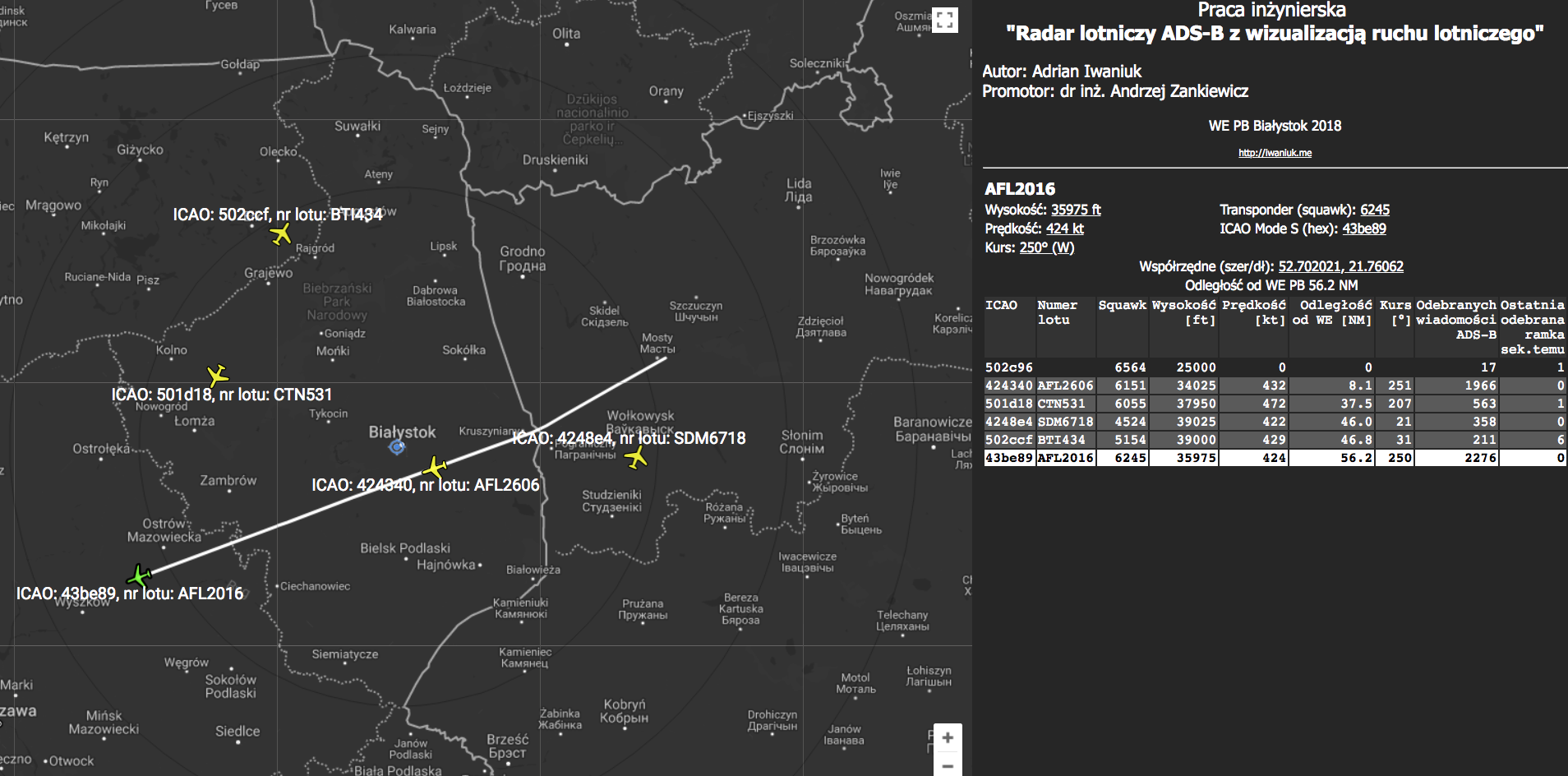
W pracy podjęto się opracowania i zestawienia ze sobą zestawu urządzeń oraz oprogramowania zdolnego odebrać, odczytać, zdekodować oraz wyświetlić na mapie pozycję wraz z informacjami o okolicznych statkach powietrznych nadających sygnał ADS-B. Zestaw urządzeń został zamontowany na Wydziale Elektrycznym Politechniki Białostockiej tak, aby był ogólnodostępny dla wszystkich studentów.